Raytheon Autonomous Drone Project Conclusion


This post is a short conclusion to the project. Please read my other posts for the background design and development.
Link to Semester 1 post: alex.doud.io/raytheon-drone-project-sem-1/
Link to Semester 2 post: alex.doud.io/raytheon-drone-project-sem-2/
Special Thanks to our corporate and faculty advisors Dr. Tacca, Christine, and Alfonso. Their input was invaluable to the project, not just from an engineering standpoint but in team management as well.
Test Flights
We spent the week leading up to the competition training roles, test flying, and debugging our code. Two days before the competition we were granted access to the football field that we would compete on, UT Arlington Stadium. We typically spent about 12 hours on the field both days doing test flights and debugging.
We started with Challenge 1 and RTK homing. This worked flawlessly once our RTK base station was homed in to .25 meters. We played around with speeding it up but we were overall satisfied with its performance.
Our main focus was on Challenge 2 with hue detection not working based on camera settings (exposure, white balance, etc.). We only got Challenge 2 consistently working at 8 PM the day before the competition because we shifted to a grid search, instead of hue detection.
Here is a video of that working:
The day before the competition we also were able to set up and test our drone on the obstacle course. We consistently got Challenge 3 avoiding obstacles and making it to the other end after some Ardupilot parameter modifications.
We did not have enough time to test Challenge 4.
Competition Day
The schedule of the day was laid out like this:
- Poster session
- Challenge 1
- Challenge 2
- Lunch
- Challenge 3
- Move indoors and do Challenge 4
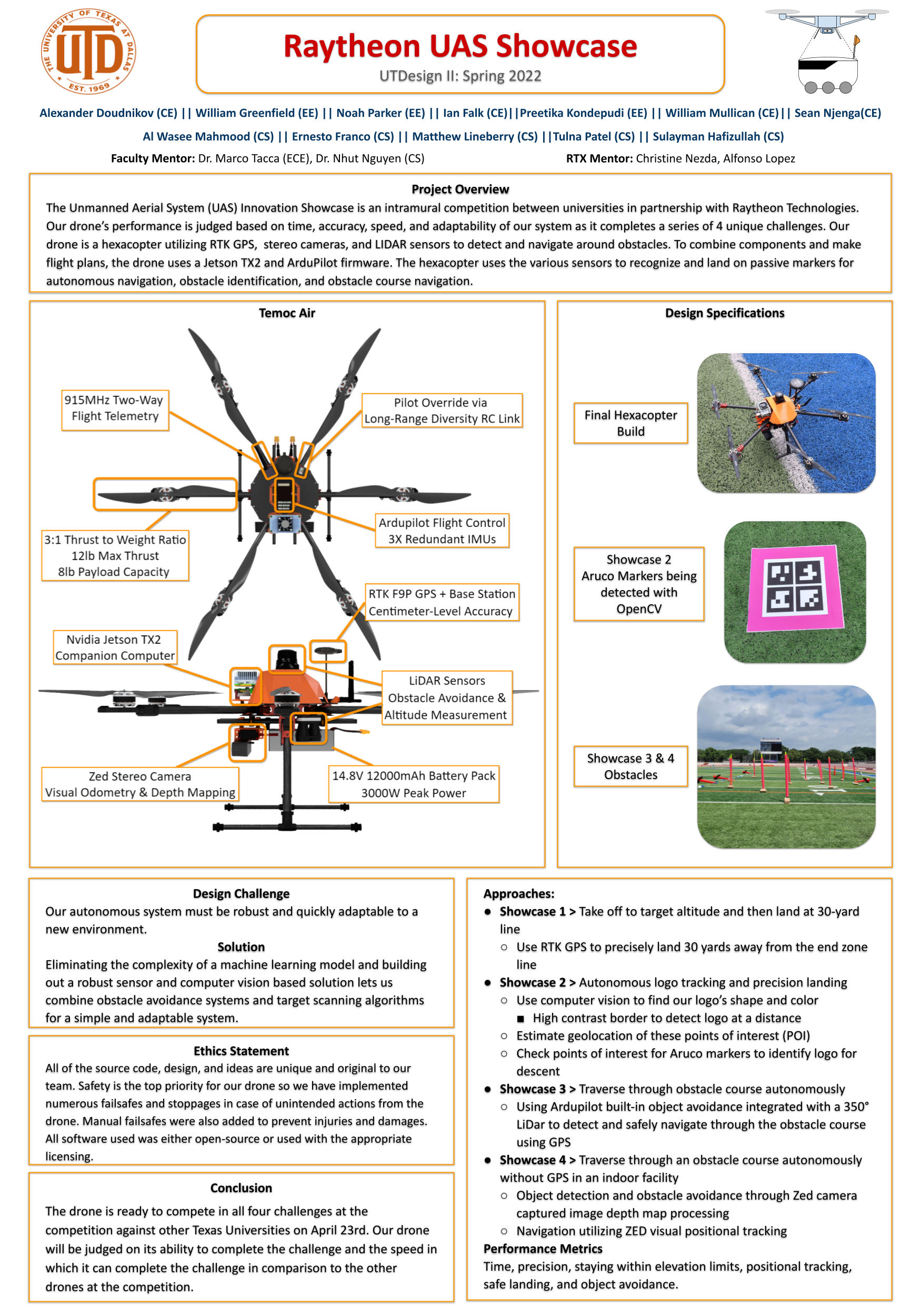
Here is the poster we presented:
Competition Results
The overall performance of the drone at the competition was more than pleasing, and the team ended up being awarded first place for it. Challenge 1 was completed in 30 seconds and landed with perfect accuracy in the center of the 30 yard line. For challenge 2 the drone managed to locate our logo when doing a grid search, but unfortunately was unable to land directly on it. Challenge 3 was completed in 3 minutes and 36 seconds, and avoided all obstacles in the course. Lastly, we were sadly unable to attempt challenge 4 due to time constraints.
UTDesign EXPO Semester 2 Results
Our project won first out of all second semester Electrical and Computer Engineering projects at EXPO this year.
Final Report
Photos & Videos from Showcase and EXPO







